

Описание
В этом уроке мы научим Raspberry Pi Zero W определять форму и цвет объектов в кадре
Видео
Нам понадобится
- 1x Raspberry Pi Zero W
- 1x Pi камера
- 1x Шлейф камеры
- 1x microSD карта
- 1x Источник питания USB
- 1x Провод USB-microUSB
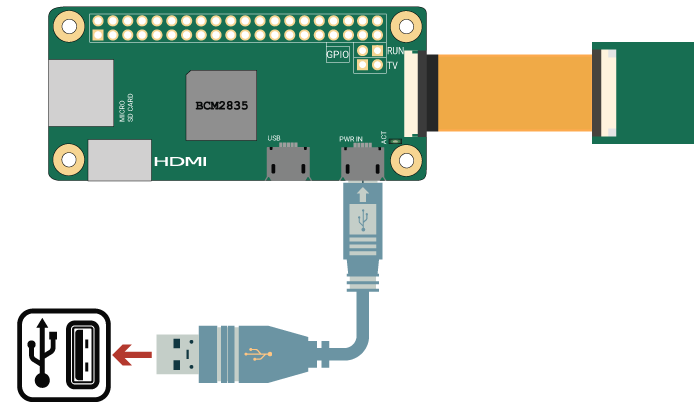
Подключение
Для подробного пояснения подключения и установки библиотек обратитесь к предыдущему уроку
Cкрипт проекта
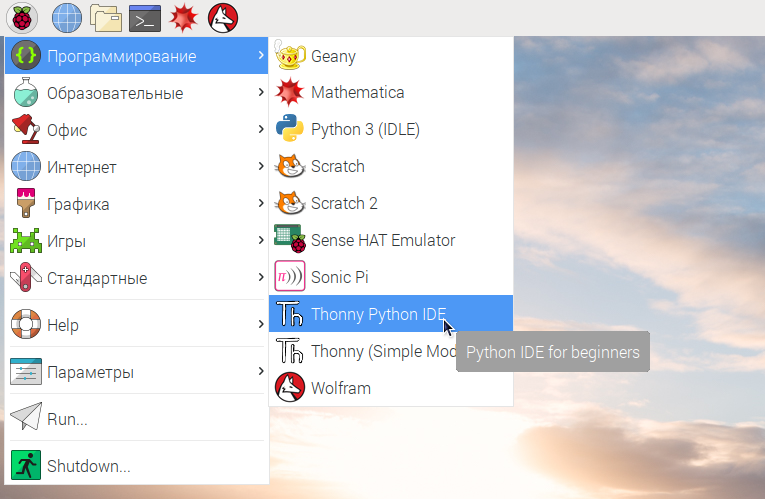
Откроем Thonny Python IDE и введём в него следующий скрипт.
# Импортируем библиотеки
from PIL import ImageDraw, ImageFont, Image
import numpy as np
from imutils.video import VideoStream
import imutils
import cv2
from time import sleep
# Загружаем шрифт
FONT = ImageFont.truetype("/usr/share/fonts/truetype/freefont/FreeSansBold.ttf", 16)
# минимальный размер пятна
BLOBSIZE = 1000
# константы насыщенности и яркости
S_MIN = 29
S_MAX = 255
V_MIN = 148
V_MAX = 255
# примерные значения тона для фильтров
HUES = {
"оранжевый": 10,
"жёлтый": 40,
"зелёный": 55,
"синий": 100,
"фиолетовый" : 130,
"красный": 165,
}
# цвет подсвечивания контуров (красный, зелёный, синий)
CONTCOLOR = (0, 255, 0)
# толщина линии контура
CTHICK = 2
# определяем размеры кадра
FRAMESIZE = (640, 480)
# создаём объект видео потока
vs = VideoStream(src=0, usePiCamera=True, resolution=FRAMESIZE, framerate=32).start()
# ждём окончания инициализации видеопотока
sleep(2)
# определяем функцию проверки углов контура
def shapeDetect(c):
# инициируем переменную названия фигуры и приблизительный контур
shape = ""
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.04 * peri, True)
# если 3 вершины - фигура треугольник
if len(approx) == 3:
shape = "треугольник"
# если 4 - прямоугольник
elif len(approx) == 4:
# вычисляем прямоугольник в который вписывается фигура
# и его отношение сторон
(x, y, w, h) = cv2.boundingRect(approx)
ar = w / float(h)
# если отношение сторон не 1 - значит прямоугольник
shape = "квадрат" if ar >= 0.95 and ar <= 1.05 else "прямоугольник"
# иначе - круг
else:
shape = "круг"
# возвращаем название фигуры
return shape
# входим в бесконечный цикл
while True:
# считываем кадр из потока
image = vs.read()
# создаём его копию для вывода
img_copy = image.copy()
# уменьшаем изображение для ускорения вычислений
resized = imutils.resize(image, width=300)
# вычисляем отношение оригинального изображения к уменьшенному
ratio = image.shape[0] / float(resized.shape[0])
# проходим по всем тонам
for hue in HUES:
# вычисляем порог тона
h_min = HUES[hue] - 10
h_max = HUES[hue] + 10
# определяем границы цвета в HSV
lower_range = np.array([h_min, S_MIN, V_MIN])
upper_range = np.array([h_max, S_MAX, V_MAX])
# конвертируем изображение в HSV
hsv = cv2.cvtColor(resized, cv2.COLOR_BGR2HSV)
# создаём маску из границ цвета
thres = cv2.inRange(hsv, lower_range, upper_range)
thres = cv2.GaussianBlur(thres, (5, 5), 0)
# вывод масок всех цветов
#cv2.imshow(hue, thres) # раскомментируйте для вывода
# находим контуры
cnts = cv2.findContours(
thres.copy(),
cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE
)
cnts = imutils.grab_contours(cnts)
# Следующие два цикла можно объединить в один если
# нет необходимости выводить текст кириллицей. Для
# вывода латиницы используйте cv2.putText()
# проходим по всем контурам
for c in cnts:
# если площадь текущего контура мала...
if cv2.contourArea(c) < BLOBSIZE:
# переходим к следующему
continue
# приводим размеры контуров к исходным
c = c.astype("float")
c *= ratio
c = c.astype("int")
# выводим контуры на копию изображения
cv2.drawContours(img_copy, [c], -1, CONTCOLOR, CTHICK)
# Следующие манипуляции нужны для вывода текста кириллицей.
# Конвертируем изображение из BGR в RGB
img = cv2.cvtColor(img_copy, cv2.COLOR_BGR2RGB)
# создаём объект изображения PIL из массива пикселей
im_pil = Image.fromarray(img)
# создаём объект рисования
draw = ImageDraw.Draw(im_pil)
# проходим по всем контурам
for c in cnts:
# если площадь текущего контура мала...
if cv2.contourArea(c) < BLOBSIZE:
# переходим к следующему
continue
# получаем моменты изображения контура
M = cv2.moments(c)
cX = 0
cY = 0
# вычисляем из моментов координаты
if M["m00"] != 0:
cX = int((M["m10"] / M["m00"]) * ratio)
cY = int((M["m01"] / M["m00"]) * ratio)
# вычисляем название фигуры
shapename = shapeDetect(c)
shapename = hue + " " + shapename
# выводим название фигуры
draw.text((cX, cY), shapename, font=FONT)
# конвертируем объект изображения PIL обратно в массив пикселей
img_copy = np.asarray(im_pil)
# конвертируем изображение из RGB в BGR
img_copy = cv2.cvtColor(img_copy, cv2.COLOR_BGR2RGB)
# выводим изображение
cv2.imshow("Image", img_copy)
# Если была нажата клавиша ESC
k = cv2.waitKey(1)
if k == 27:
# прерываем выполнение цикла
break
# закрываем все окна
cv2.destroyAllWindows()
# останавливаем видео поток
vs.stop()
Ссылки
- Машинное зрение на Raspberry Pi определение координат объектов выбранного цвета в кадре
- Raspberry Pi Zero W
- Pi камера
- Шлейф камеры
- microSD карта
- Источник питания USB
- Провод USB-microUSB
- Wiki: Установка и настройка Raspberry Pi
- Wiki: Raspberry Pi, настройка для работы в режиме Headless
- Wiki: Камера для Raspberry Pi
- Wiki: становка и использование модулей (библиотек) Python

Обсуждение