

Описание
В этом уроке мы подключим Pi камеру к Raspberry Pi Zero W и разберёмся как использовать библиотеку opencv-python для определения координат объектов выбранного цвета в кадре.
Машинное зрение — это применение компьютерного зрения для промышленности и производства, и в этом видео уроке мы рассмотрим частный случай такого зрения, в котором будем определять координаты положения яркого контрастного объекта в поле видимости камеры Распберри. Определение группы пикселей одного цвета не слишком сложная задача для компьютеров, поэтому для её осуществление возьмём Raspberry Pi Zero W с относительно не высокими вычислительными способностями.
Видео
Нам понадобится
- 1x Raspberry Pi Zero W
- 1x Pi камера
- 1x Шлейф камеры
- 1x microSD карта
- 1x Источник питания USB
- 1x Провод USB-microUSB
Подключение
Руководствуясь статьёй на нашей Wiki, настроим Raspberry на работу через VNC.
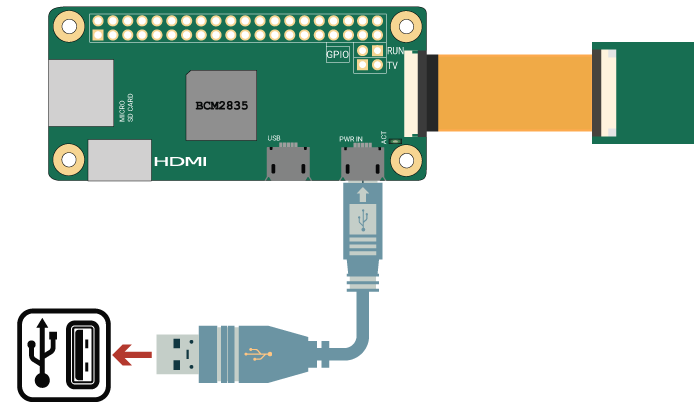
После настройки подключим камеру:

Подключим питание:
Далее подключимся к Raspberry через VNC, как в статье выше
Установка библиотек
Установим библиотеки для работы с компьютерным зрением.
Откроем эмулятор терминала
Для работы скрипта нам потребуются библиотеки opencv-python, imutils, numpy и libatlas-base-dev. Первые три мы установим при помощи pip, а последнюю при помощи apt.
Введём в окно терминала следующую строку и нажмём
pip3 install opencv-python imutils numpy
Далее установим libatlas-base-dev таким же образом, только после нажатия raspberry, пароль никак не отображается во время ввода):
sudo apt install libatlas-base-dev
Cкрипт проекта
Откроем Thonny Python IDE и введём в него следующий скрипт.
import cv2
import numpy as np
from imutils.video import VideoStream
import imutils
from time import sleep
# название окна подстройки
WINDOWNAME = "Настройка тона"
# минимальный размер контуров пятна
BLOBSIZE = 1500
# константы насыщенности и яркости
S_MIN = 29
S_MAX = 255
V_MIN = 148
V_MAX = 255
# цвет прямоугольника (B, G, R)
RECTCOLOR = (0, 255, 0)
# толщина линии прямоугольника
RTHICK = 2
# определяем функцию проверки размера пятна
def checkSize(w, h):
if w * h > BLOBSIZE:
return True
else:
return False
# определяем пустую функцию
def empty(a):
pass
# определяем размеры кадра
frameSize = (320, 240)
# создаём объект видео потока
vs = VideoStream(src=0, usePiCamera=True, resolution=frameSize, framerate=32).start()
# ждём окончания инициализации видеопотока
sleep(2)
# создаём окно с ползунком
cv2.namedWindow(WINDOWNAME)
cv2.resizeWindow(WINDOWNAME, 500, 100)
cv2.createTrackbar("Hue", WINDOWNAME, 0, 180, empty)
while True:
# получаем кадр изображения
image = vs.read()
# получаем максимальный и минимальный тон из значения ползунка
h_min = cv2.getTrackbarPos("Hue", WINDOWNAME) - 10
h_max = cv2.getTrackbarPos("Hue", WINDOWNAME) + 10
# определяем границы цвета в HSV
lower_range = np.array([h_min, S_MIN, V_MIN])
upper_range = np.array([h_max, S_MAX, V_MAX])
# конвертируем изображение в HSV
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# создаём маску выбранного цвета
thresh = cv2.inRange(hsv, lower_range, upper_range)
# побитово складываем оригинальную картинку и маску
bitwise = cv2.bitwise_and(image, image, mask=thresh)
# показываем картинку маски цвета
cv2.imshow("bitwise", bitwise)
# удаляем цвет из маски
gray = cv2.cvtColor(bitwise, cv2.COLOR_BGR2GRAY)
# ищем контуры в картинке
contours, _ = cv2.findContours(gray, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
# если контуры найдены...
if len(contours) != 0:
# выводим найденные контуры
#cv2.drawContours(image, contours, -1, 255, 1)
# находим контуры бОльшего размера
c = max(contours, key = cv2.contourArea)
# получаем координаты прямоугольника, в который они вписаны
x,y,w,h = cv2.boundingRect(c)
# если прямоугольник достаточного размера...
if checkSize(w, h):
# выводим его
cv2.rectangle(image, (x, y), (x+w, y+h), RECTCOLOR, RTHICK)
# Показываем картинку с квадратом выделения
cv2.imshow("Image", image)
# Если была нажата клавиша ESC
k = cv2.waitKey(1)
if k == 27:
# прерываем выполнение цикла
break
# закрываем все окна
cv2.destroyAllWindows()
# останавливаем видео поток
vs.stop()

Обсуждение