
Введение:
В этом уроке мы создадим машинку, которая будет ездить по траектории нарисованной линии, а также останавливаться при обнаружении препятствий.
При создании любого робота, его нужно оснастить датчиками (показания которых будет считывать робот), управляющими модулями (для вывода результатов работы робота), и скетчем (по алгоритму которого должен работать робот). В нашем случае, мы оснастим машинку, тремя аналоговыми датчиками линий и одним ультразвуковым датчиком расстояния, а в роли управляющих модулей выступят два закрепленных к каркасе моторчика, с колёсами на валах.
Видео:
Нам понадобится:
- Arduino Uno х 1шт.
- Motor Shield (на 2 канала) x 1шт.
- Аналоговый датчик линии x 3шт.
- Машинка (базовый комплект)
Для реализации проекта нам необходимо установить библиотеку:
- iarduino_HC_SR04_int для работы с ультразвуковыми датчиками расстояния по внешним прерываниям.
О том как устанавливать библиотеки, Вы можете ознакомиться на странице Wiki - Установка библиотек в Arduino IDE.
Схема подключения:
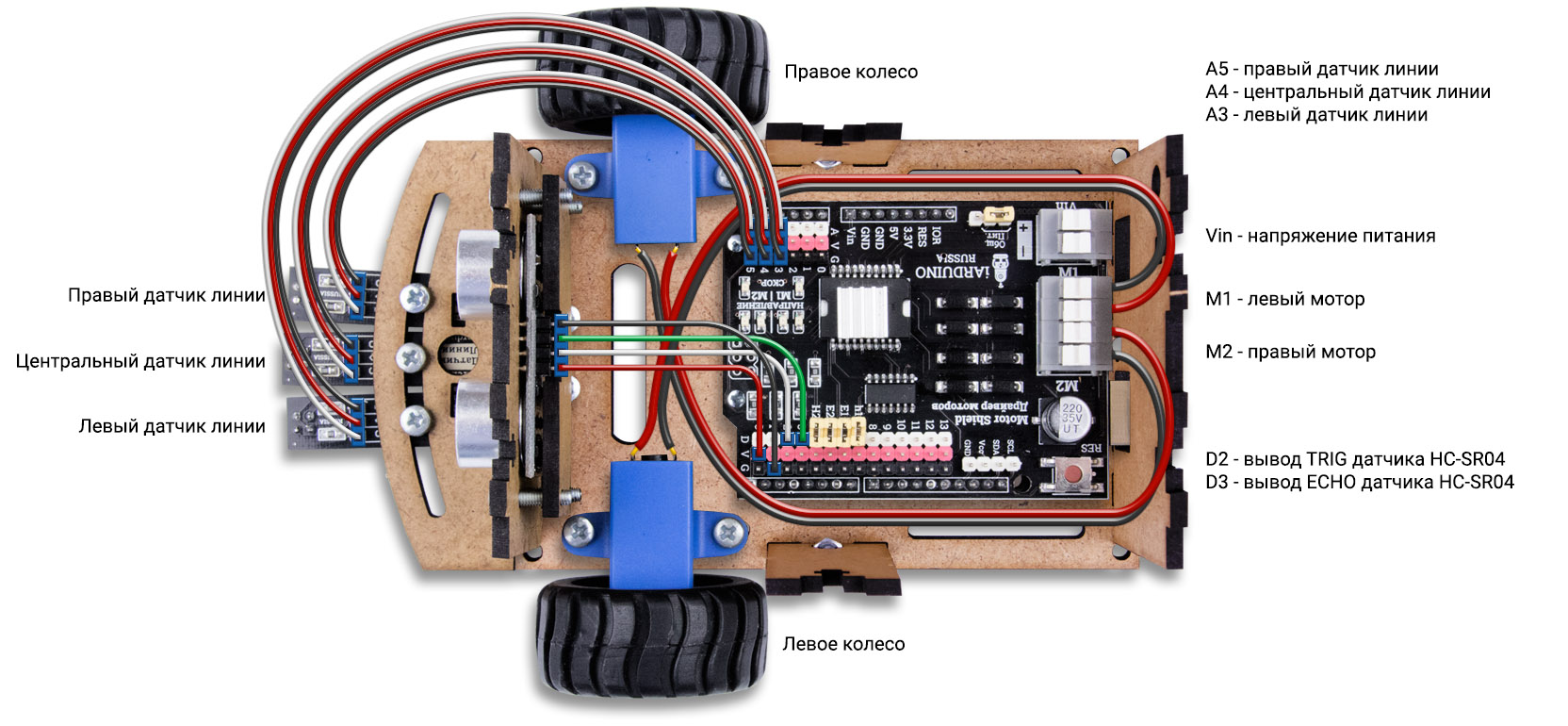
Моторчики подключаются к клеммам M1 (левый мотор) и M2 (правый мотор) расположенным на Motor Sield. Аналоговые датчики линии подключаются к любым аналоговым входам Arduino Uno, в нашем примере используются входы A5 (для правого датчика), A4 (для центрального датчика) и A3 (для левого датчика). Вывод TRIG ультразвукового датчика расстояния подключается к любому выводу Arduino Uno, в нашем случае вывод D2. Вывод ECHO, при использовании библиотеки iarduino_HC_SR04_int, может подключаться только к тем выводам Arduino Uno, которые используют внешние прерывания, в нашем случае это вывод D3. Все датчики запитаны от напряжения 5 В. Напряжение питания на Arduino Uno подаётся через Motor Shield (клеммник Vin), для чего нужно установить перемычку, рядом с клеммником, в позицию «Общ. Пит.». Входы Motor Shield H1 (направление 1 мотора), E1 (ШИМ 1 мотора), E2 (ШИМ 2 мотора), H2 (направление 2 мотора), по умолчанию, подключены к выводам D7, D6, D5 и D4 соответственно, но их можно поменять, сняв перемычку и соединив вывод Motor Shield с нужным выводом Arduino Uno.
Алгоритм работы:
- Если центральный датчик находится на линии, а боковые вне линии, то машинка едет прямо.
- Если левый датчик находится на линии, а правый вне линии, то машинка поворачивает налево (независимо от показаний центрального датчика)
- Если правый датчик находится на линии, а левый вне линии, то машинка поворачивает направо (независимо от показаний центрального датчика)
- Если правый и левый датчики находятся на линии (вне зависимости от показаний центрального датчика), то такое состояние является неопределённым, машинка продолжает предыдущее движение (прямо или с поворотом) в течение 2 секунд (можно менять в скетче). Если в течение этого времени состояние не изменится, то она остановится.
- Если все три датчика находятся вне линии, то такое состояние является неопределённым (потеря линии). Если этому состоянию предшествовал поворот, то машинка продолжит поворот в течении 2 секунд (можно менять в скетче). Если в течении этого времени состояние не изменится, то она остановится. Если этому состоянию не предшествовал поворот (машинка ехала прямо и линия оборвалась), то машинка сразу остановится.
- Если перед машинкой появилось препятствие, на расстоянии менее 10 см (можно менять в скетче), то машинка остановится и продолжит движение, как только препятствие исчезнет.
Скорость движения задаётся в константе valSpeed, от 1 до 255. Крутизна поворотов задаётся в константе valTurning, от 1 до 255. Время продолжения движения, при неопределённом состоянии, задаётся в константе tmrDelay, в микросекундах. Направление движения моторов указывается логическими значениями элементов массива arrRoute (0 элемент - правый мотор, 1 элемент - левый мотор), по умолчанию все элементы равны «1». Если вы перепутали полярность при подключении мотора, то измените значение соответствующего элемента этого массива на «0».
Калибровка для светлых, слабоконтрастных или цветных линий:
Машинка настроена на движение по темной линии, но она может ездить по светлым, слабоконтрастным или цветным линиям. Для этого её нужно откалибровать, указав значения для констант valSensor1 (показание датчика находящегося на линии) и valSensor0 (показание датчика находящегося вне линии). Для чего, в коде setup скетча, предусмотрен вывод показаний центрального датчика в монитор последовательного порта.
- Поместите машинку так, чтобы центральный датчик находился над линией.
- Подключите Arduino Uno по USB кабелю.
- Откройте монитор последовательного порта. В мониторе высветится показание датчика на линии.
- Поместите машинку так, чтобы центральный датчик находился вне линии.
- Нажмите кнопку reset на Motor Shield. В мониторе высветится показание датчика вне линии.
- Укажите первое значение константе valSensor1, а второе значение константе valSensor0 и повторно загрузите скетч.
Код программы:
Копировать123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899// БИБЛИОТЕКИ: #include <iarduino_HC_SR04_int.h> // подключаем библиотеку для работы с датчиком // НОМЕРА ВЫВОДОВ: const uint8_t pinSensorL = A3; // Вывод к которому подключен датчик находящийся слева (по направлению движения) const uint8_t pinSensorC = A4; // Вывод к которому подключен датчик находящийся по центру (по направлению движения) const uint8_t pinSensorR = A5; // Вывод к которому подключен датчик находящийся справа (по направлению движения) const uint8_t pinSens_TRIG = 2; // Вывод к которому подключен датчик расстояния HC_SR04 (вывод обозначенный на датчике как TRIG) const uint8_t pinSens_ECHO = 3; // Вывод к которому подключен датчик расстояния HC_SR04 (вывод обозначенный на датчике как ECHO) const uint8_t pinShield_LH = 7; // Вывод направления к которому подключен левый мотор (по направлению движения) const uint8_t pinShield_LE = 6; // Вывод ШИМ к которому подключен левый мотор (по направлению движения) const uint8_t pinShield_RE = 5; // Вывод ШИМ к которому подключен левый мотор (по направлению движения) const uint8_t pinShield_RH = 4; // Вывод направления к которому подключен левый мотор (по направлению движения) // ОБЪЕКТЫ: iarduino_HC_SR04_int hcsr(pinSens_TRIG, pinSens_ECHO); // Объект hcsr для работы с библиотекой iarduino_HC_SR04 (вывод TRIG, вывод ECHO) // УСТАНАВЛИВАЕМЫЕ ЗНАЧЕНИЯ: const uint16_t valSensor1 = 930; // Показание датчика находящегося на линии (указывается для конкретной трассы) const uint16_t valSensor0 = 730; // Показание датчика находящегося вне линии (указывается для конкретной трассы) const uint8_t valSpeed = 255; // Максимальная скорость (число от 1 до 255) const uint32_t tmrDelay = 2000; // Время в течении которого требуется остановиться (если в течении этого времени состояние остаётся неопределённым (линия не обнаружена), то требуется остановиться) const uint8_t valTurning = 10; // Крутизна поворотов (скорость реакции) (число от 1 до 255) const uint8_t valDistance = 20; // Минимально допустимое расстояние до объекта в сантиметрах (если расстояние будет меньше, то требуется остановитьтся) const bool arrRoute[2] = {1,1}; // Направление движения для каждого мотора (зависит от полярности, нулевой элемент - правый мотор, первый элемент - левый мотор) // РАССЧИТЫВАЕМЫЕ ЗНАЧЕНИЯ: uint8_t arrSpeed[2]; // Рассчитываемая скорость для каждого мотора (число от 1 до valSpeed, нулевой элемент - правый мотор, первый элемент - левый мотор) uint16_t valSensorM; // Рассчитываемое среднее значение датчика (значение между цветом линии и цветом вне линии) uint8_t valSensor; // Биты рассчитываемых логических уровней всех датчиков (0bxxxxxLCR) bool flgLine; // Флаг указывающий на то, что используется светлая линия (0 - тёмная линия, 1 - светлая линия) int8_t flgTurning; // Флаг наличия и направления поворота (0 - не поворачиваем, -1 - поворачиваем налево, +1 - поворачиваем направо) bool flgPWM; // Флаг указывающий на то, что требуется изменить ШИМ моторов (0 - тёмная линия, 1 - светлая линия) bool flgStop; // Флаг указывающий на необходимость остановиться (0 - без остановки, 1 - требуется остановиться) bool flgDistance; // Флаг обнаружения препятствия (0 - не обнаружено, 1 - обнаружено) uint32_t tmrMillis; // Время совершения последней операции (в миллисекундах) void setup(){ // Узнаём цвет линии используемой на трассе, если он светлый, то устанавливаем флаг lineColor тёмный flgLine = (valSensor0>valSensor1); // Если условие (valSensor0>valSensor1) выполняется значит линия светлая и флаг flgLine установится в 1, иначе он сбросится в 0 // Вычисляем среднее значение между показаниями датчиков на линии и все линии if(flgLine){valSensorM=valSensor1+(valSensor0-valSensor1)/2;} // Если на трассе используется светлая линия else {valSensorM=valSensor0+(valSensor1-valSensor0)/2;} // Если на трассе используется тёмная линия // Устанавливаем значение скорости обоих моторов arrSpeed[1]=valSpeed; // Максимальная скорость на левом моторе arrSpeed[0]=valSpeed; // Максимальная скорость на правом моторе // Устанавливаем флаг ШИМ, сбрасываем флаг наличия поворота, флаг остановки и флаг обнаружения припятствий flgPWM=1; flgTurning=0; flgStop=0; flgDistance=0; // Устанавливаем режим работы выводов и направление обоих моторов pinMode (pinSensorL, INPUT ); // Конфигурируем вывод pinSensorL как вход (для получения данных от левого датчика линии) pinMode (pinSensorC, INPUT ); // Конфигурируем вывод pinSensorC как вход (для получения данных от центрального датчика линии) pinMode (pinSensorR, INPUT ); // Конфигурируем вывод pinSensorR как вход (для получения данных от правого датчика линии) pinMode (pinShield_LH, OUTPUT ); // Конфигурируем вывод pinShield_LH как выход (для управления направлением движения левого мотора) pinMode (pinShield_LE, OUTPUT ); // Конфигурируем вывод pinShield_LE как выход (для управления скоростью вращения левого мотора, при помощи ШИМ) pinMode (pinShield_RE, OUTPUT ); // Конфигурируем вывод pinShield_RE как выход (для управления скоростью вращения правого мотора, при помощи ШИМ) pinMode (pinShield_RH, OUTPUT ); // Конфигурируем вывод pinShield_RH как выход (для управления направлением движения правого мотора) digitalWrite(pinShield_LH, arrRoute[1]); // Устанавливаем на выходе pinShield_LH уровень arrRoute[1] (направление движения левого мотора) digitalWrite(pinShield_RH, arrRoute[0]); // Устанавливаем на выходе pinShield_RH уровень arrRoute[0] (направление движения правого мотора) // Выводим показания центрального датчика линии Serial.begin(9600); while(!Serial){} // Инициируем передачу данных по последовательному порту (на скорости 9600 бит/сек) Serial.println(analogRead(pinSensorC)); // Выводим показания центрального датчика линии (для указания значений константам valSensor0 и valSensor1) // Устанавливаем задержку и обновляем время совершения последней операции delay(2000); tmrMillis = millis(); } void loop(){ // Читаем показания датчиков и преобразуем их в логические уровни // (1 - датчик на линии, 0 - датчик вне линии) valSensor = 0; // сбрасываем все биты переменной valSensor valSensor |= ((analogRead(pinSensorL)>valSensorM)^flgLine)<<2; // Устанавливаем 2 бит переменной valSensor в 1 если левый датчик находится на линии, иначе оставляем бит сброшенным в 0 valSensor |= ((analogRead(pinSensorC)>valSensorM)^flgLine)<<1; // Устанавливаем 1 бит переменной valSensor в 1 если средний датчик находится на линии, иначе оставляем бит сброшенным в 0 valSensor |= ((analogRead(pinSensorR)>valSensorM)^flgLine)<<0; // Устанавливаем 0 бит переменной valSensor в 1 если правый датчик находится на линии, иначе оставляем бит сброшенным в 0 // РАССМОТРИМ ТРИ ПРЕДЫДУЩИЕ СТРОКИ: Каждая строка устанавливает или сбрасывает свой бит переменной valSensor в зависимости от того, находится датчик на линии или нет. // Оператор составного побитового ИЛИ "|=" выполнит побитовое ИЛИ между переменной valSensor и результатом всех вычислений, полученное значение запишется в valSensor. // Оператор сравнения ">" вернет "1" если значение analogRead(номер_вывода) больше чем значение valSensorM, а значит датчик находится над объектом, который темнее чем значение valSensorM, // Результат возвращённый оператором сравнения ">" нам подходит если используется тёмная линия, но если используется светлая линия, то результат нужно инвертировать ... // Оператор побитового XOR "^" выполнит эту инверсию, только если установлен флаг flgLine, указывающий о том, что используется светлая линия // Оператор побитового сдвига влево "<<" сдвинет результат на указанное число бит, таким образом каждый результат займет свою позицию. // Определяем действия в соответствии с текущим положением датчиков switch(valSensor){ // Сохраняем время: Меняем флаг ШИМ: Меняем флаг поворота: Меняем флаг остановки: case 0b000: flgPWM=flgTurning; flgStop=!flgTurning; break; // 000 - Если все датчики находятся вне линии (неопределённое состояние - если до этого мы не поворачивали, то резко останавливаемся, а если поворачивали, то продолжаем поворот в ту же сторону) case 0b010: tmrMillis=millis(); flgPWM=flgTurning; flgTurning=0; flgStop=0; break; // 010 - Если только центральный датчик находится на линии (продолжаем движение прямо) case 0b100: // 100 - Если только левый датчик находится на линии (поворачиваем влево) case 0b110: tmrMillis=millis(); flgPWM=1; flgTurning=-1; flgStop=0; break; // 110 - Если левый и центральный датчики находятся на линии (поворачиваем влево) case 0b001: // 001 - Если только правый датчик находится на линии (поворачиваем вправо) case 0b011: tmrMillis=millis(); flgPWM=1; flgTurning=1; flgStop=0; break; // 011 - Если правый и центральный датчики находятся на линии (поворачиваем вправо) default: flgPWM=1; break; // 1x1 - Если правый и левый датчики находятся на линии (неопределённое состояние) } if(tmrMillis>millis()) { tmrMillis=0;} // Избавляемся от переполнения millis(); if(tmrMillis+tmrDelay<millis()){ flgPWM=1; flgTurning=0; flgStop=1; } // Останавливаемся если линия потеряна на более чем tmrDelay мс if(hcsr.distance()<valDistance){ tmrMillis=millis(); flgPWM=1; flgDistance=1; } // Останавливаемся если обнаружено препятствие else if(flgDistance) { tmrMillis=millis(); flgPWM=1; flgDistance=0; } // Продолжаем движение если препятствие исчезло // Устанавливаем ШИМ для моторов if(flgPWM){flgPWM=0; // Если установлен флаг flgPWM, то сбрасываем его и устанавливаем ШИМ ... switch(flgTurning){ // Скорость левого мотора: Скорость правого мотора: case -1: if(arrSpeed[1]>0){arrSpeed[1]--;} arrSpeed[0]=valSpeed; break; // Уменьшаем скорость левого мотора (поворачиваем налево) case 0: arrSpeed[1]=valSpeed; arrSpeed[0]=valSpeed; break; // Устанавливаем одинаковую скорость (едим прямо) case 1: arrSpeed[1]=valSpeed; if(arrSpeed[0]>0){arrSpeed[0]--;} break; // Уменьшаем скорость правого мотора (поворачиваем направо) } if(flgStop){ arrSpeed[1]=0; arrSpeed[0]=0;} // Останавливаемся если установлен флаг flgStop if(flgDistance){ arrSpeed[1]=0; arrSpeed[0]=0;} // Останавливаемся если установлен флаг flgDistance // Выводим ШИМ analogWrite(pinShield_LE, arrSpeed[1]); analogWrite(pinShield_RE, arrSpeed[0]); } }
Ссылки:
Комплект для повторения проекта
Что понадобится
Это быстрый ориентир по основным модулям и деталям. Полный список для повторения проекта смотрите в самой статье.
7 позиций Датчик линии QRD1114 (Аналоговый / Trema-модуль)
Сенсор для определения цвета поверхности по шкале от чёрного до белого
Открыть в iArduino
Датчик линии QRD1114 (Аналоговый / Trema-модуль)
Сенсор для определения цвета поверхности по шкале от чёрного до белого
Открыть в iArduino
 Ультразвуковой дальномер HC-SR04
Сенсор определения расстояния до 4 м по отраженному звуковому сигналу
Открыть в iArduino
Ультразвуковой дальномер HC-SR04
Сенсор определения расстояния до 4 м по отраженному звуковому сигналу
Открыть в iArduino
 Крепеж для мотора N20
закрепленных
Открыть в iArduino
Крепеж для мотора N20
закрепленных
Открыть в iArduino
 Мотор-редуктор 1:150, 100rpm
Миниатюрный 12 мм мотор-редуктор для различных робототехнических проектов
Открыть в iArduino
Мотор-редуктор 1:150, 100rpm
Миниатюрный 12 мм мотор-редуктор для различных робототехнических проектов
Открыть в iArduino
 Колесо для на вал D3 Micro Metal Gearmotor
колёсами
Открыть в iArduino
Колесо для на вал D3 Micro Metal Gearmotor
колёсами
Открыть в iArduino
 Arduino Uno R3 (USB ATmega16U2)
Платформа c микроконтроллером ATmega328P на ядре AVR с чипом USB ATmega16U2 для разработки электронных устройств на языке C++
Открыть в iArduino
Arduino Uno R3 (USB ATmega16U2)
Платформа c микроконтроллером ATmega328P на ядре AVR с чипом USB ATmega16U2 для разработки электронных устройств на языке C++
Открыть в iArduino
 Motor Shield, 2 канала (до 10.8В, 2А)
Позволяющая управлять моторами с напряжением 3-10,8V и током до 2А
Открыть в iArduino
Motor Shield, 2 канала (до 10.8В, 2А)
Позволяющая управлять моторами с напряжением 3-10,8V и током до 2А
Открыть в iArduino